

目标跟踪系统(D题)
1.任务
目标跟踪系统包含控制器、毫米波雷达、二维云台及LED电筒。以自主寻迹运动的电动车作为目标靶,目标跟踪系统使用毫米波雷达传感器,发现目标靶并用安装在二维云台上的LED电筒指向目标靶。
2.要求
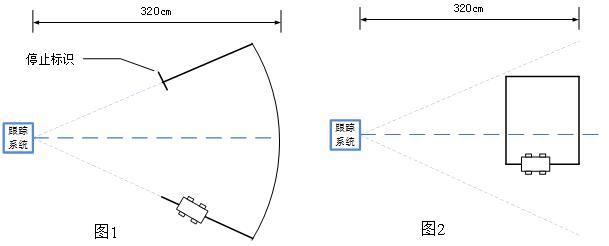
(1) 基于现场提供的电动车(含驱动及部分传感器),设计并制作寻迹行驶控制系统,使电动车能够沿地面铺设的黑色引导线(线宽3~3.5cm)骑线行驶,在停车标识处停止,见图1,行驶中速度平稳,不得停顿。(15分)
(2) 寻迹行进时电动车可在3个时段(s)内设置不同车速(cm/s)及行驶时间,车速范围:5~30cm/s。(15分)
(3) 电动车按指定角度径向寻迹运动,到停止标识停车;以目标跟踪系统上自定义的某点为基准点,测量电动车行进的速度、方向及行进距离。(15分)
(4) 电动车按照现场测试要求设置三个速度运行区段并按指定轨迹行驶,见图2示例,跟踪系统测量电动车轨迹;运动结束,在液晶屏上描绘出电动车的运动轨迹;标注出小车在运动行进过程中不同区段(方向、速度有明显差异)的速度、方向、行进距离。(30分)
(5) 电动车按照指定轨迹行进,目标跟踪系统控制二维云台,用LED电筒追踪照射锁定电动车,实时显示目标速度、方向及距离变化量;小车被电筒照射到,需有声光响应。(15分)
(6) 其他自主发挥(10分)
(7) 设计报告(10分)
项目 | 主要内容 | 满分 |
系统需求分析 | 需求分析、实现方法 | 3 |
系统设计与实现 | 硬件、软件设计 模块、部件应用 | 4 |
测试结果 | 电动车寻迹及速度控制, 移动目标距离、速度、方向等 | 3 |
总分 | 10 | |
3.说明
(1) 赛题中,电动车(含电机)、二维云台、毫米波雷达、LED电筒、控制器模块等均采用现场提供的资源。
(2) 电动车行走地面为白色,有暗灰色细辐射线;引导线包含直线、折线、圆弧线等元素,线宽3~3.5cm。
(3) 评测时临时指定行驶轨迹,轨迹范围不超出320cm×280cm区域。
(4) 电动车与目标跟踪系统之间不得有任何形式的联系。



