

TI 杯2019年全国大学生电子设计竞赛题B-巡线机器人
巡线机器人(B题)
【本科组】
一、任务
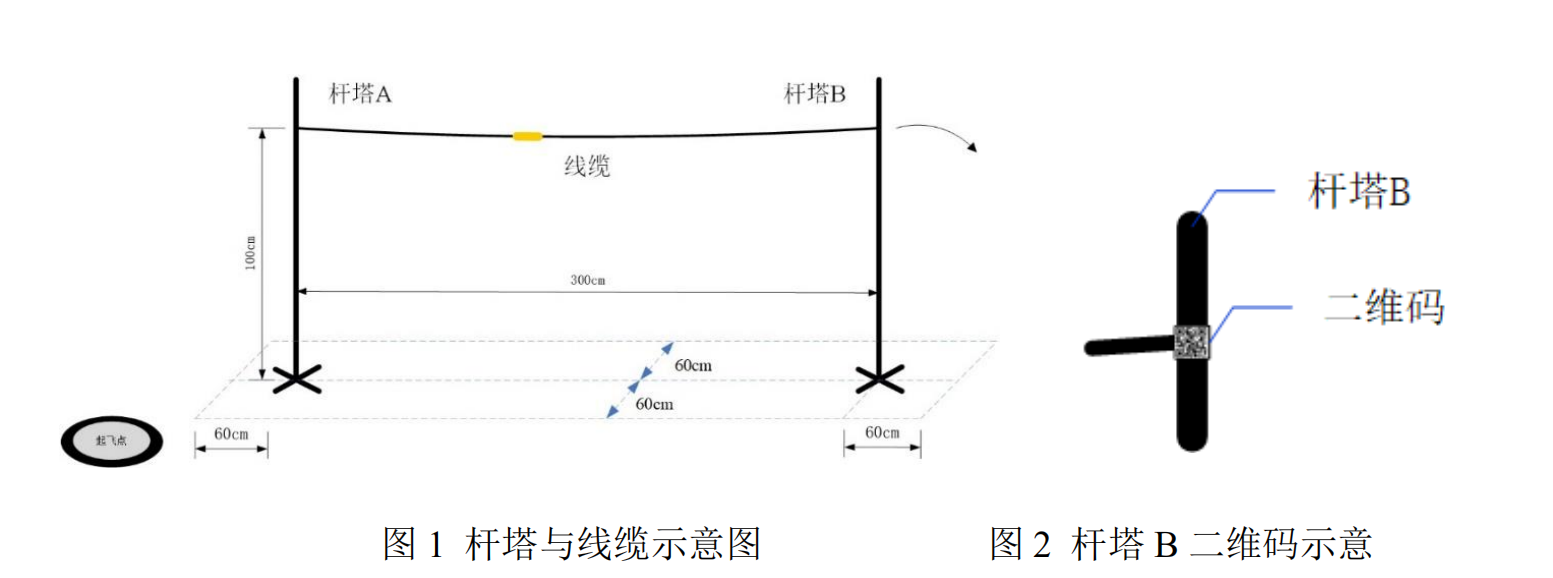
设计一基于四旋翼飞行器的巡线机器人,能够巡检电力线路及杆塔状态 (见图 1),发现异常时拍摄存储,任务结束传送到地面显示装置上显示。巡线 机器人中心位置需安装垂直向下的激光笔,巡线期间激光笔始终工作,以标识 航迹。
二、要求
1.基本要求
(1) 巡线机器人从距 A 杆塔 1 米范围内的起飞点起飞,以 1 米定高绕杆巡 检,巡检流程为:起飞→杆塔 A→电力线缆→绕杆塔 B→电力线缆→ 杆塔 A,然后稳定降落;巡检期间,巡线机器人激光笔轨迹应落在地 面虚线框内。
(2) 从起飞到降落,巡线完成时间不得大于 150 秒,巡线时间越短越好。
(3) 发现线缆上异物(黄色凸起物),巡线机器人须在与异物距离不超过 30cm 的范围内用声或光提示。
2.发挥部分
(1) 拍摄所发现线缆异物上的条形码图片存储到 SD 卡,巡检结束后在显 示装置上清晰显示,并能用手机识别此条形码内容。
(2) 发现并拍摄杆塔 B 上的二维码图片存储到 SD 卡,巡检结束后在显示 装置上清晰显示,并能用手机识别此二维码内容。
(3) 拍摄每张条形码、二维码图片存储的照片数不得 超过 3 张。
(4) 停机状况下,在巡线机器人某一旋翼轴下方悬挂 一质量为 100g 的配重,然后巡线机器人在图 3 所示环形圆板上自主起飞,并在 1 米高度平稳悬 停 10 秒以上,且摆动范围不得大于±25cm。 (5) 在测试现场随机选择一个简单飞行动作任务,30 分钟内现场编程调试完成飞行动作。 图 3 环形圆板 (6) 其他。

三、说明
1. 电力线缆与杆塔说明
(1) 线缆的直径不大于 5mm,颜色为黑色。
(2) 杆塔高度约 150cm,直径不大于 30mm。
(3) 线缆上异物上粘贴有圆环状的黄底黑色 8 位数条形码,条形码宽度约 30±2mm,见图 4。
(4) 线缆上的异物为黄色(红绿蓝三原色参数为:R-255,G-255,B-0), 直径约 30±2mm,长度约 50±5mm。
(5) 二维码粘贴在杆塔 B 上与线缆连接处外侧,大小 30±3mm 见方,见 图 5。
2.巡线机器人要求:
(1) 参赛队所用飞行器应遵守中国民用航空局的管理规定(《民用无人驾驶航空器实名制登记管理规定》,编号:AP-45-AA-2017-03)。
(2) 四旋翼飞行器最大轴间距不大于 420mm。
(3) 为确保安全,飞行器桨叶须全防护(防护圈将飞行器或桨叶全包),否 则不得测试;测试区应设置防护网。
(4) 巡线机器人不得有“无线通信及遥控”功能。
(5) 除飞行器机械构件、飞行控制(电调)、摄像功能模块外,巡线机器人 其他功能的实现不得采用飞行器集成商提供的组件,必须自主设计完 成。
(6) 激光笔可采用悬挂等软连接方式。
3. 测试流程说明
(1) 起飞前,飞行器可手动放置到起飞点;可手动控制起飞;起飞后整个 巡检过程中不得人为干预。
(2) 从基本部分(1)到发挥部分(3)的巡线工作须一次连续完成,期间 不得人为干预,也不得更换电池;允许测试 2 次,按最好成绩记录; 两次测试间可更换电池。
(3) 发挥部分(1)、(2)中拍摄的条形码及二维码图片存储在存储介质(如 SD 卡)中,巡线完成后在地面显示装置上读取显示,用手机识别;手 机及显示装置作为作品的组成部分,必须与作品一起封存。
(4) 在巡线区地面标识±60cm 区域,见图 1,巡线机器人巡检航迹可参照 激光笔光点轨迹摄像判定。
(5) 基本部分(1)到发挥部分(3)测试完成后,进行发挥部分(4)测试; 增加配重后,不得自行另加其他配重。
(6) 现场编程实现的任务在所有其他测试工作(包括“其他”项目)完成 之后进行。编程调试超时判定任务未完成;编程调试时间计入成绩。 编程下载工具必须与作品一起封存。
(7) 测试现场应避免窗外强光直接照射,避免高照度点光源照明;尽量采 用多点分布式照明,以减小飞行器自身投影的影响。
(8) 飞行场地地面可采用图 6 所示灰白条纹纸质材料铺设。灰白条纹各宽 20mm,灰色的红绿蓝三原色参数为:R-178,G-178,B-178。
(9) 飞行期间,飞行器触及地面后自行恢复飞行的,酌情扣分;触地后 5 秒内不能自行恢复飞行视为失败,失败前完成动作仍有效。
(10)平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等情况 出现。
(11)调试及测试时必须佩带防护眼镜,穿戴防护手套。





