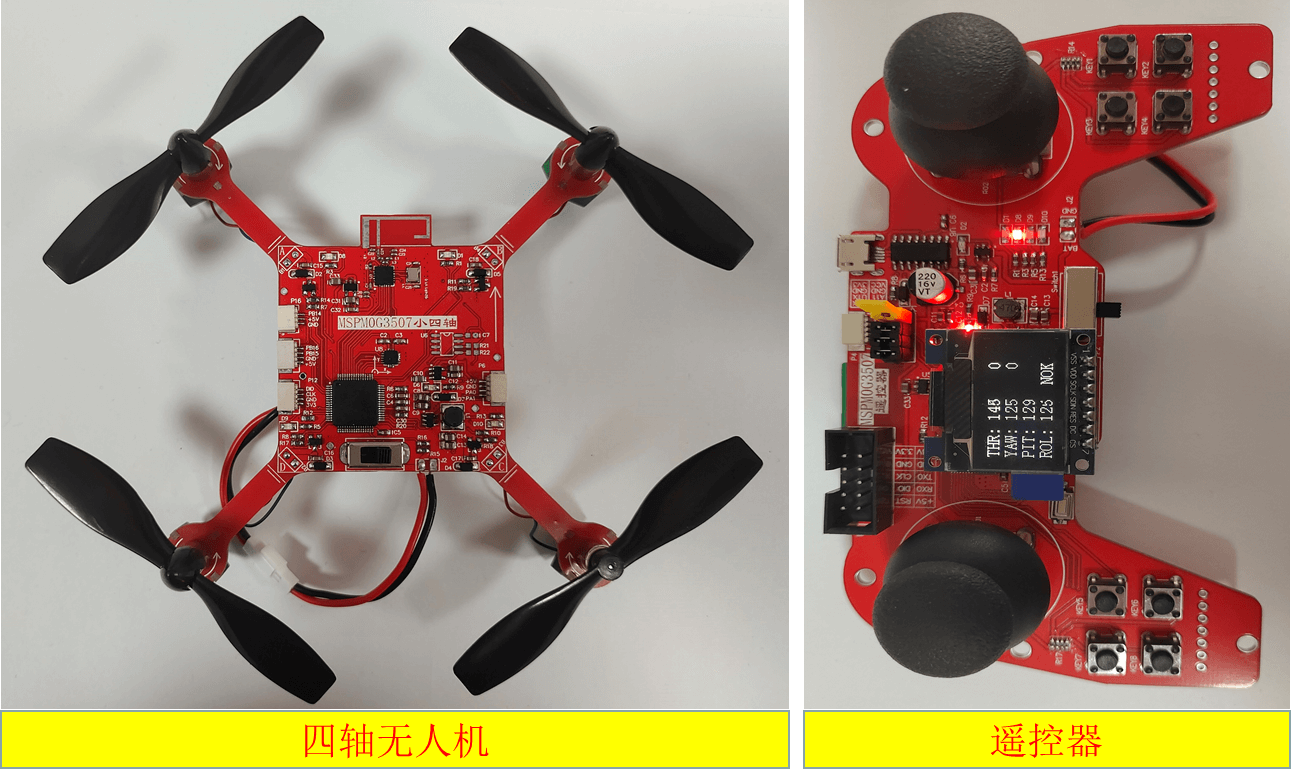
微型四轴无人机基于易于开发使用的 MSPM0G3507 系列处理器控制,同时具备遥控飞行、自主起飞、数据回传等功能,并且在传感器、电机、飞机构架方面具备高度集成性。搭配同款处理器的万能遥控器,不仅能对无人机进行常规控制,还能快速的配置调整显示无人机的飞行参数。
a. 接口外设
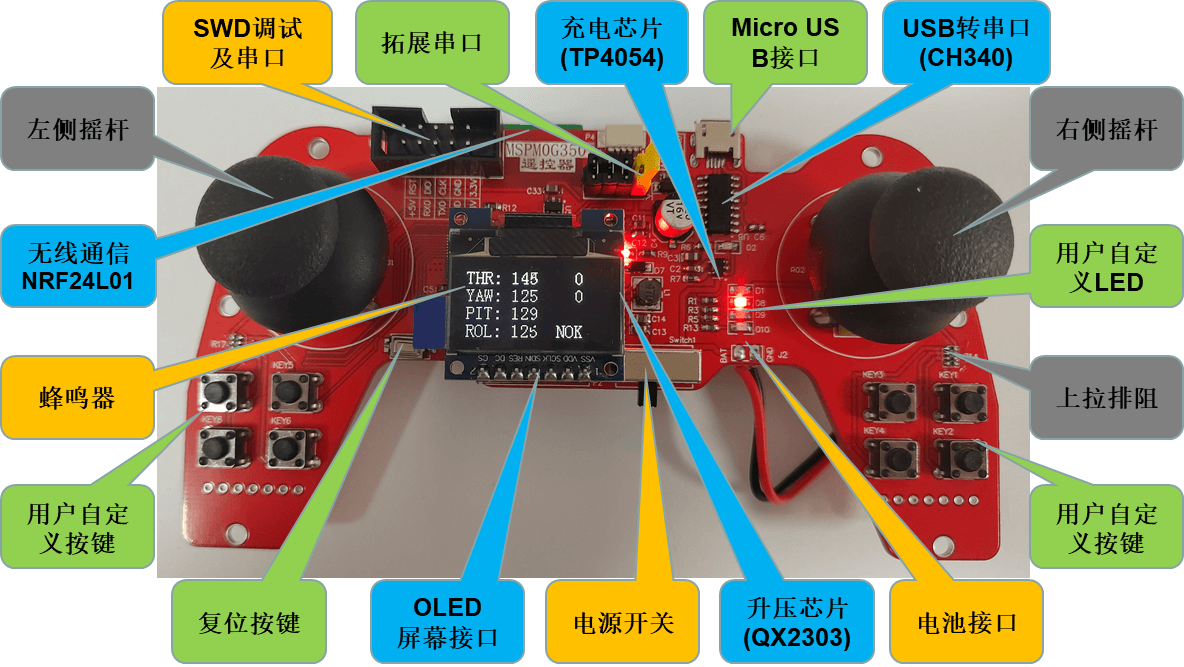
– 具有4个独立用户LED,默认为蓝色。用于指示无人机和遥控器的状态。
– 遥控器具有8个独立用户按键,都为上拉输入,支持灵活按键及外部中断程序设计。
– 遥控器具有1个OLED屏幕接口,128×64分辨率,SPI接口,简单显示遥控器数据。
– 遥控器具有1个有源蜂鸣器,可进行鸣叫报警。
– 具有电池电压输入检测,可进行电池电压采集实现低电压报警。
– 遥控器具有四路摇杆输入检测,可检测摇杆数据实现遥控。
– 具有1路NRF24L01无线接口,SPI总线接口,可进行无线通信。
– 四轴无人机引出2路串口,遥控器引出1路串口,可进行串口通信。
– 四轴无人机引出1路PPM接口,可以实现PPM通信。
– 遥控器具有USB转串口,使用芯片(CH340B),实现USB和上位机串口通讯。
– 四轴无人机具有6轴姿态传感器,使用ICM20602芯片,可以准确采集加速度和角速度数据。
– 四轴无人机具有EEPROM,使用AT24C02芯片,可以保存2K飞行数据。
– 引出SWD调试接口,可进行SWD代码调试烧录。
b. 功能介绍
– 四轴无人机:
o 遥控飞行功能
o 依靠遥控器实现无人机的起飞、降落、姿态控制,使微型四轴无人机完成指定的飞行动作,可以通过特定的遥控指令实现解锁、上锁、传感器校准等功能。
o 遥控器上自带的OLED屏幕可以显示遥控器的各个控制量,实现精准控制。
o 自主起飞功能
o 依靠外部姿态传感器和程序逻辑,实现无人机的自主起飞和降落。
o 可以实现解锁后起飞或者一键起飞的功能。
o 数据回传功能
o 通过NRF24L01数传芯片,实现微型四轴无人机和遥控器的数据双向通信,可以实时得到无人机的姿态数据和电池电量。方便监控无人机信息。
o 微型四轴无人机在回传数据时,并不会影响微型四轴无人机的飞行控制,数据传输十分稳定。
– 遥控器:
o 万能遥控器基于MSPM0G3507同型号处理器,与微型四轴无人机通过无线数传进行通信。
o 可以对微型四轴无人机进行姿态控制和飞行高度控制。
o 具有蜂鸣器作为输入反馈。
o 设置多个按键,便于实现微型四轴无人机参数的设定,方便参数调试。
o 具备OLED屏幕显示各个参数,便于参数调试和数据监控。
o 便于教学管理的其他设计:
o 微型四轴无人机小巧便携,方便学生携带。
o 电池体积小,便于携带、更换和充电。
o 微型四旋翼无人机安全性高,可以在实验室走廊或者开阔场地完成飞行试验任务。
c. 接口外设
– 工程建立(基于Keil)
– GPIO实验(基于Keil)
– 中断系统实验(基于Keil)
– 定时器实验(基于Keil)
– 串口实验(基于Keil)
– SPI实验(基于Keil)
– IIC实验(基于Keil)
– ADC实验(基于Keil)
– 无线通信实验(基于Keil)
– 姿态解算实验(基于Keil)
– 串级PID姿态控制实验(基于Keil)
a. 板卡的基础手册资料,包括简介、原理图、实验指导书等;
b. 参考实验的工程代码
c. 配套的使用视频(B站)
配套出版的教材(即将出版,敬请期待)